01
Sep 2021
Diseñan brazo mecánico inspirado en los pulpos
[ad_1]
 El sistema utiliza campos magnéticos tridimensionales en vez de motores para controlar las secciones que forman el dispositivo.
El sistema utiliza campos magnéticos tridimensionales en vez de motores para controlar las secciones que forman el dispositivo. 

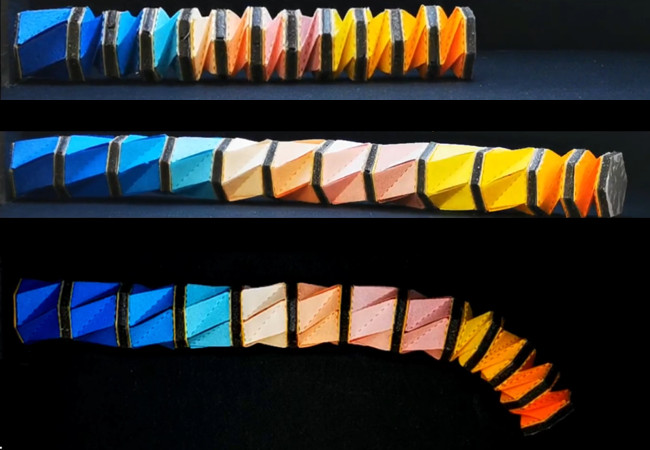
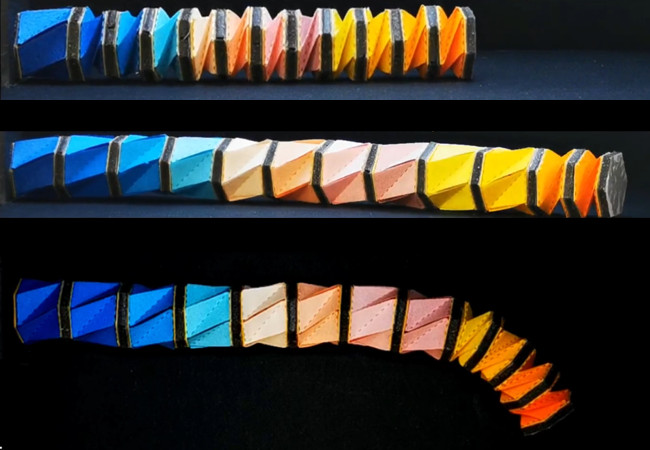
No es una guirnalda, es un robot inspirado en los brazos de un pulpo.
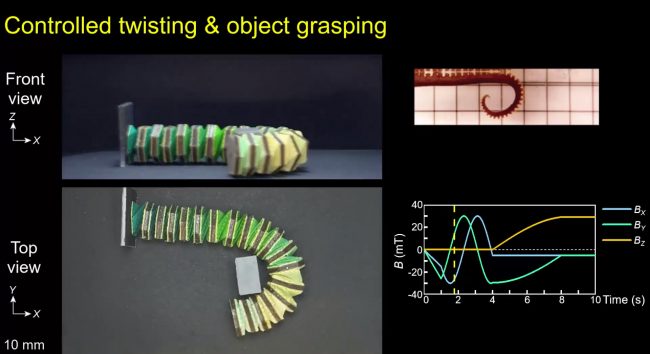
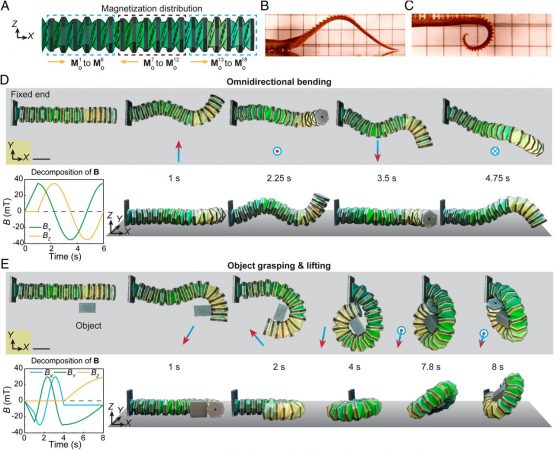
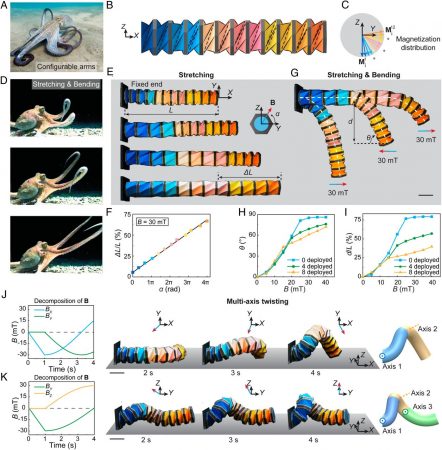
Los desarrolladores han querido imitar el modo en que se mueve el brazo de un pulpo, la capacidad de la extremidad para torcerse, estirarse y manipular objetos.
La flexibilidad es sin dudas la mayor ventaja del diseño.
Utilidad
En cuanto a su uso, se espera que pueda ser aplicado en la biomedicina. Podría ser una herramienta de gran valor en operaciones médicas de invasión mínima, como puede ser la instalación de un catéter o un tubo de respiración.
La idea de brazos de pulpo entrando en el cuerpo humano puede sonar mal, propia de ciertos géneros del comic japonés, pero tiene mucho potencial.
Diseño y funcionamiento
El brazo tiene un diseño segmentado y un exoesqueleto suave. Los segmentos están hechos de plástico plegado de una forma similar a la que observaríamos en un origami.
Los movimientos se generan a través de campos magnéticos tridimensionales producidos en una serie de placas hexagonales de silicona (con partículas magnéticas adheridas) que separan los segmentos. Cada segmento puede ser controlado de forma independiente.
Ruike Renee Zhao, autora de la publicación que detalla el funcionamiento del dispositivo, explica algunas de las ventajas técnicas del diseño:
“En el pulpo el sistema nervioso está localizado en los brazos. Lo que estamos haciendo es imitar un sistema altamente inteligente (…) Como el brazo es tan versátil es capas de cientos, miles de diferentes movimientos para interactuar con objetos”.
El uso de campos magnéticos permite ahorrar una considerable cantidad de espacio que de otro modo estaría ocupado por motores.
[ad_2]